
Multi-Step Reasoning with Large Language Models, a Surveycs.AI updates on arXiv.org arXiv:2407.11511v3 Announce Type: replace
Abstract: Large language models (LLMs) with billions of parameters exhibit in-context learning abilities, enabling few-shot learning on tasks that the model was not specifically trained for. Traditional models achieve breakthrough performance on language tasks, but do not perform well on basic reasoning benchmarks. However, a new in-context learning approach, Chain-of-thought, has demonstrated strong multi-step reasoning abilities on these benchmarks. The research on LLM reasoning abilities started with the question whether LLMs can solve grade school math word problems, and has expanded to other tasks in the past few years. This article reviews the field of multi-step reasoning with LLMs. We propose a taxonomy that identifies different ways to generate, evaluate, and control multi-step reasoning. We provide an in-depth coverage of core approaches and open problems, and we propose a research agenda for the near future. We find that multi-step reasoning approaches have progressed beyond math word problems, and can now successfully solve challenges in logic, combinatorial games, and robotics, sometimes by first generating code that is then executed by external tools. Many studies in multi-step methods use reinforcement learning for finetuning, external optimization loops, in-context reinforcement learning, and self-reflection.
arXiv:2407.11511v3 Announce Type: replace
Abstract: Large language models (LLMs) with billions of parameters exhibit in-context learning abilities, enabling few-shot learning on tasks that the model was not specifically trained for. Traditional models achieve breakthrough performance on language tasks, but do not perform well on basic reasoning benchmarks. However, a new in-context learning approach, Chain-of-thought, has demonstrated strong multi-step reasoning abilities on these benchmarks. The research on LLM reasoning abilities started with the question whether LLMs can solve grade school math word problems, and has expanded to other tasks in the past few years. This article reviews the field of multi-step reasoning with LLMs. We propose a taxonomy that identifies different ways to generate, evaluate, and control multi-step reasoning. We provide an in-depth coverage of core approaches and open problems, and we propose a research agenda for the near future. We find that multi-step reasoning approaches have progressed beyond math word problems, and can now successfully solve challenges in logic, combinatorial games, and robotics, sometimes by first generating code that is then executed by external tools. Many studies in multi-step methods use reinforcement learning for finetuning, external optimization loops, in-context reinforcement learning, and self-reflection. Read More
The Ghost in the Keys: A Disklavier Demo for Human-AI Musical Co-Creativitycs.AI updates on arXiv.org arXiv:2511.01663v1 Announce Type: cross
Abstract: While generative models for music composition are increasingly capable, their adoption by musicians is hindered by text-prompting, an asynchronous workflow disconnected from the embodied, responsive nature of instrumental performance. To address this, we introduce Aria-Duet, an interactive system facilitating a real-time musical duet between a human pianist and Aria, a state-of-the-art generative model, using a Yamaha Disklavier as a shared physical interface. The framework enables a turn-taking collaboration: the user performs, signals a handover, and the model generates a coherent continuation performed acoustically on the piano. Beyond describing the technical architecture enabling this low-latency interaction, we analyze the system’s output from a musicological perspective, finding the model can maintain stylistic semantics and develop coherent phrasal ideas, demonstrating that such embodied systems can engage in musically sophisticated dialogue and open a promising new path for human-AI co-creation.
arXiv:2511.01663v1 Announce Type: cross
Abstract: While generative models for music composition are increasingly capable, their adoption by musicians is hindered by text-prompting, an asynchronous workflow disconnected from the embodied, responsive nature of instrumental performance. To address this, we introduce Aria-Duet, an interactive system facilitating a real-time musical duet between a human pianist and Aria, a state-of-the-art generative model, using a Yamaha Disklavier as a shared physical interface. The framework enables a turn-taking collaboration: the user performs, signals a handover, and the model generates a coherent continuation performed acoustically on the piano. Beyond describing the technical architecture enabling this low-latency interaction, we analyze the system’s output from a musicological perspective, finding the model can maintain stylistic semantics and develop coherent phrasal ideas, demonstrating that such embodied systems can engage in musically sophisticated dialogue and open a promising new path for human-AI co-creation. Read More
Unlocking Reasoning Capabilities in LLMs via Reinforcement Learning Explorationcs.AI updates on arXiv.org arXiv:2510.03865v2 Announce Type: replace-cross
Abstract: Reinforcement learning with verifiable rewards (RLVR) has recently enhanced the reasoning capabilities of large language models (LLMs), particularly for mathematical problem solving. However, a fundamental limitation remains: as the sampling budget increases, the advantage of RLVR-trained models over their pretrained bases often diminishes or even vanishes, revealing a strong dependence on the base model’s restricted search space. We attribute this phenomenon to the widespread use of the reverse Kullback-Leibler (KL) divergence regularizer, whose mode-seeking behavior keeps the policy trapped inside the base model’s support region and hampers wider exploration. To address this issue, we propose RAPO (Rewards-Aware Policy Optimization), an algorithm to promote broader yet focused exploration. Our method (i) utilizes the forward KL penalty to replace the reverse KL penalty for out-of-distribution exploration, and (ii) reweights the reference policy to facilitate adaptive in-distribution exploration. We train Qwen2.5-3B and 7B models with RAPO on the 8K SimpleRL-Zero dataset, without supervised fine-tuning, and evaluate them on AIME2024 and AIME2025. Results show that RAPO consistently improves problem-solving performance. Notably, RAPO enables models to surpass the base model’s performance ceiling and solves previously intractable problems, advancing the frontier of RLVR for challenging reasoning tasks.
arXiv:2510.03865v2 Announce Type: replace-cross
Abstract: Reinforcement learning with verifiable rewards (RLVR) has recently enhanced the reasoning capabilities of large language models (LLMs), particularly for mathematical problem solving. However, a fundamental limitation remains: as the sampling budget increases, the advantage of RLVR-trained models over their pretrained bases often diminishes or even vanishes, revealing a strong dependence on the base model’s restricted search space. We attribute this phenomenon to the widespread use of the reverse Kullback-Leibler (KL) divergence regularizer, whose mode-seeking behavior keeps the policy trapped inside the base model’s support region and hampers wider exploration. To address this issue, we propose RAPO (Rewards-Aware Policy Optimization), an algorithm to promote broader yet focused exploration. Our method (i) utilizes the forward KL penalty to replace the reverse KL penalty for out-of-distribution exploration, and (ii) reweights the reference policy to facilitate adaptive in-distribution exploration. We train Qwen2.5-3B and 7B models with RAPO on the 8K SimpleRL-Zero dataset, without supervised fine-tuning, and evaluate them on AIME2024 and AIME2025. Results show that RAPO consistently improves problem-solving performance. Notably, RAPO enables models to surpass the base model’s performance ceiling and solves previously intractable problems, advancing the frontier of RLVR for challenging reasoning tasks. Read More
EBT-Policy: Energy Unlocks Emergent Physical Reasoning Capabilitiescs.AI updates on arXiv.org arXiv:2510.27545v1 Announce Type: cross
Abstract: Implicit policies parameterized by generative models, such as Diffusion Policy, have become the standard for policy learning and Vision-Language-Action (VLA) models in robotics. However, these approaches often suffer from high computational cost, exposure bias, and unstable inference dynamics, which lead to divergence under distribution shifts. Energy-Based Models (EBMs) address these issues by learning energy landscapes end-to-end and modeling equilibrium dynamics, offering improved robustness and reduced exposure bias. Yet, policies parameterized by EBMs have historically struggled to scale effectively. Recent work on Energy-Based Transformers (EBTs) demonstrates the scalability of EBMs to high-dimensional spaces, but their potential for solving core challenges in physically embodied models remains underexplored. We introduce a new energy-based architecture, EBT-Policy, that solves core issues in robotic and real-world settings. Across simulated and real-world tasks, EBT-Policy consistently outperforms diffusion-based policies, while requiring less training and inference computation. Remarkably, on some tasks it converges within just two inference steps, a 50x reduction compared to Diffusion Policy’s 100. Moreover, EBT-Policy exhibits emergent capabilities not seen in prior models, such as zero-shot recovery from failed action sequences using only behavior cloning and without explicit retry training. By leveraging its scalar energy for uncertainty-aware inference and dynamic compute allocation, EBT-Policy offers a promising path toward robust, generalizable robot behavior under distribution shifts.
arXiv:2510.27545v1 Announce Type: cross
Abstract: Implicit policies parameterized by generative models, such as Diffusion Policy, have become the standard for policy learning and Vision-Language-Action (VLA) models in robotics. However, these approaches often suffer from high computational cost, exposure bias, and unstable inference dynamics, which lead to divergence under distribution shifts. Energy-Based Models (EBMs) address these issues by learning energy landscapes end-to-end and modeling equilibrium dynamics, offering improved robustness and reduced exposure bias. Yet, policies parameterized by EBMs have historically struggled to scale effectively. Recent work on Energy-Based Transformers (EBTs) demonstrates the scalability of EBMs to high-dimensional spaces, but their potential for solving core challenges in physically embodied models remains underexplored. We introduce a new energy-based architecture, EBT-Policy, that solves core issues in robotic and real-world settings. Across simulated and real-world tasks, EBT-Policy consistently outperforms diffusion-based policies, while requiring less training and inference computation. Remarkably, on some tasks it converges within just two inference steps, a 50x reduction compared to Diffusion Policy’s 100. Moreover, EBT-Policy exhibits emergent capabilities not seen in prior models, such as zero-shot recovery from failed action sequences using only behavior cloning and without explicit retry training. By leveraging its scalar energy for uncertainty-aware inference and dynamic compute allocation, EBT-Policy offers a promising path toward robust, generalizable robot behavior under distribution shifts. Read More
Red Teaming AI Red Teamingcs.AI updates on arXiv.org arXiv:2507.05538v2 Announce Type: replace
Abstract: Red teaming has evolved from its origins in military applications to become a widely adopted methodology in cybersecurity and AI. In this paper, we take a critical look at the practice of AI red teaming. We argue that despite its current popularity in AI governance, there exists a significant gap between red teaming’s original intent as a critical thinking exercise and its narrow focus on discovering model-level flaws in the context of generative AI. Current AI red teaming efforts focus predominantly on individual model vulnerabilities while overlooking the broader sociotechnical systems and emergent behaviors that arise from complex interactions between models, users, and environments. To address this deficiency, we propose a comprehensive framework operationalizing red teaming in AI systems at two levels: macro-level system red teaming spanning the entire AI development lifecycle, and micro-level model red teaming. Drawing on cybersecurity experience and systems theory, we further propose a set of six recommendations. In these, we emphasize that effective AI red teaming requires multifunctional teams that examine emergent risks, systemic vulnerabilities, and the interplay between technical and social factors.
arXiv:2507.05538v2 Announce Type: replace
Abstract: Red teaming has evolved from its origins in military applications to become a widely adopted methodology in cybersecurity and AI. In this paper, we take a critical look at the practice of AI red teaming. We argue that despite its current popularity in AI governance, there exists a significant gap between red teaming’s original intent as a critical thinking exercise and its narrow focus on discovering model-level flaws in the context of generative AI. Current AI red teaming efforts focus predominantly on individual model vulnerabilities while overlooking the broader sociotechnical systems and emergent behaviors that arise from complex interactions between models, users, and environments. To address this deficiency, we propose a comprehensive framework operationalizing red teaming in AI systems at two levels: macro-level system red teaming spanning the entire AI development lifecycle, and micro-level model red teaming. Drawing on cybersecurity experience and systems theory, we further propose a set of six recommendations. In these, we emphasize that effective AI red teaming requires multifunctional teams that examine emergent risks, systemic vulnerabilities, and the interplay between technical and social factors. Read More
NumPy for Absolute Beginners: A Project-Based Approach to Data AnalysisTowards Data Science Build a high-performance sensor data pipeline from scratch and unlock the true speed of Python’s scientific computing core
The post NumPy for Absolute Beginners: A Project-Based Approach to Data Analysis appeared first on Towards Data Science.
Build a high-performance sensor data pipeline from scratch and unlock the true speed of Python’s scientific computing core
The post NumPy for Absolute Beginners: A Project-Based Approach to Data Analysis appeared first on Towards Data Science. Read More
What Building My First Dashboard Taught Me About Data StorytellingTowards Data Science Why clarity beats complexity when turning data into stories people actually understand
The post What Building My First Dashboard Taught Me About Data Storytelling appeared first on Towards Data Science.
Why clarity beats complexity when turning data into stories people actually understand
The post What Building My First Dashboard Taught Me About Data Storytelling appeared first on Towards Data Science. Read More
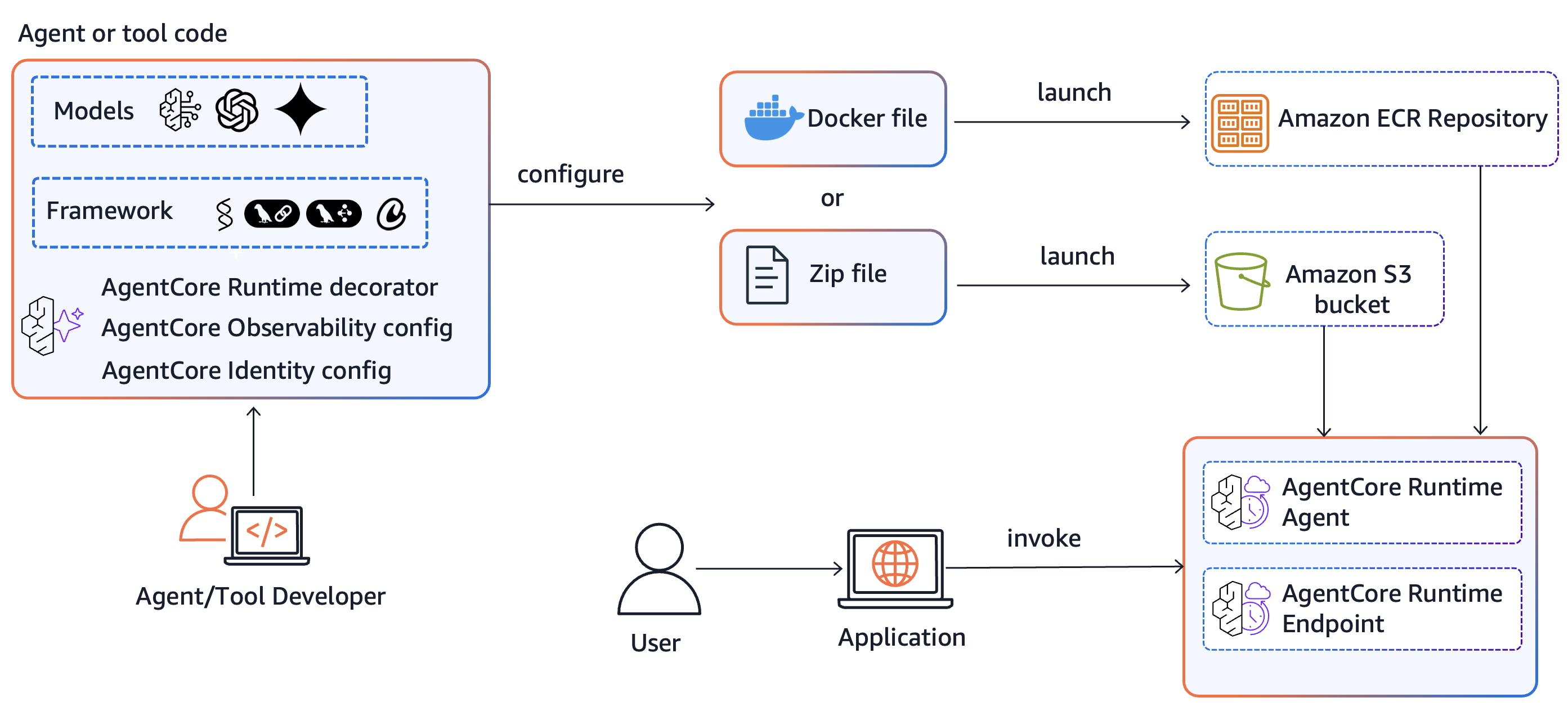
Iterate faster with Amazon Bedrock AgentCore Runtime direct code deploymentArtificial Intelligence Amazon Bedrock AgentCore is an agentic platform for building, deploying, and operating effective agents securely at scale. Amazon Bedrock AgentCore Runtime is a fully managed service of Bedrock AgentCore, which provides low latency serverless environments to deploy agents and tools. It provides session isolation, supports multiple agent frameworks including popular open-source frameworks, and handles multimodal
Amazon Bedrock AgentCore is an agentic platform for building, deploying, and operating effective agents securely at scale. Amazon Bedrock AgentCore Runtime is a fully managed service of Bedrock AgentCore, which provides low latency serverless environments to deploy agents and tools. It provides session isolation, supports multiple agent frameworks including popular open-source frameworks, and handles multimodal Read More
What to Do When Your Credit Risk Model Works Today, but Breaks Six Months Later Towards Data Science
What to Do When Your Credit Risk Model Works Today, but Breaks Six Months LaterTowards Data Science Here’s why it happens — and how to fix it
The post What to Do When Your Credit Risk Model Works Today, but Breaks Six Months Later appeared first on Towards Data Science.
Here’s why it happens — and how to fix it
The post What to Do When Your Credit Risk Model Works Today, but Breaks Six Months Later appeared first on Towards Data Science. Read More
Train a Humanoid Robot with AI and PythonTowards Data Science 3D simulations and Reinforcement Learning with MuJoCo and Gym
The post Train a Humanoid Robot with AI and Python appeared first on Towards Data Science.
3D simulations and Reinforcement Learning with MuJoCo and Gym
The post Train a Humanoid Robot with AI and Python appeared first on Towards Data Science. Read More