
Molmo2: Open Weights and Data for Vision-Language Models with Video Understanding and Groundingcs.AI updates on arXiv.org arXiv:2601.10611v2 Announce Type: replace-cross
Abstract: Today’s strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding — either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking).
arXiv:2601.10611v2 Announce Type: replace-cross
Abstract: Today’s strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding — either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking). Read More
A Dream of Spring for Open-Weight LLMs: 10 Architectures from Jan-Feb 2026Sebastian Raschka, PhD A Round Up And Comparison of 10 Open-Weight LLM Releases in Spring 2026
A Round Up And Comparison of 10 Open-Weight LLM Releases in Spring 2026 Read More
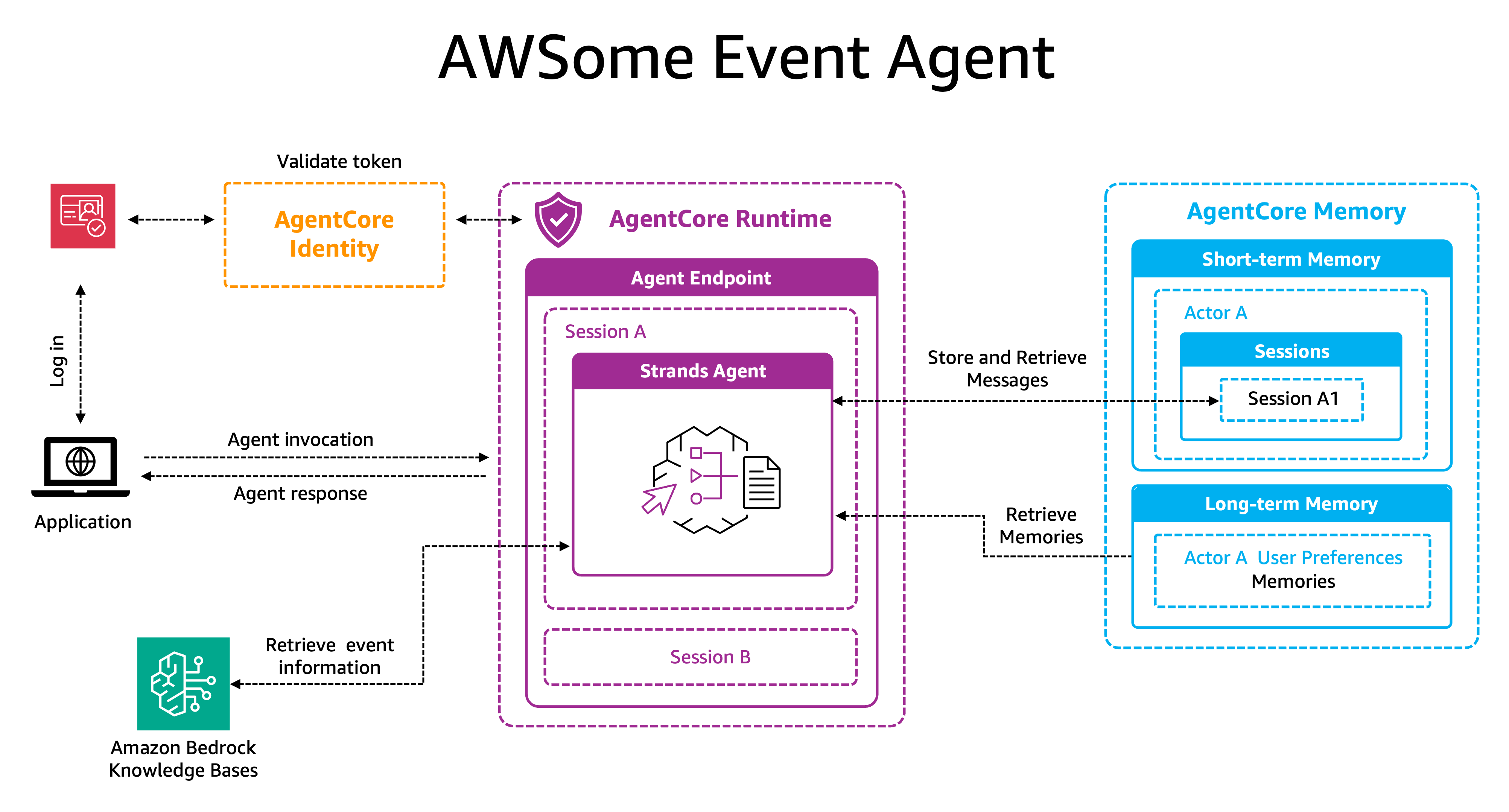
Building intelligent event agents using Amazon Bedrock AgentCore and Amazon Bedrock Knowledge BasesArtificial Intelligence This post demonstrates how to quickly deploy a production-ready event assistant using the components of Amazon Bedrock AgentCore. We’ll build an intelligent companion that remembers attendee preferences and builds personalized experiences over time, while Amazon Bedrock AgentCore handles the heavy lifting of production deployment: Amazon Bedrock AgentCore Memory for maintaining both conversation context and long-term preferences without custom storage solutions, Amazon Bedrock AgentCore Identity for secure multi-IDP authentication, and Amazon Bedrock AgentCore Runtime for serverless scaling and session isolation. We will also use Amazon Bedrock Knowledge Bases for managed RAG and event data retrieval.
This post demonstrates how to quickly deploy a production-ready event assistant using the components of Amazon Bedrock AgentCore. We’ll build an intelligent companion that remembers attendee preferences and builds personalized experiences over time, while Amazon Bedrock AgentCore handles the heavy lifting of production deployment: Amazon Bedrock AgentCore Memory for maintaining both conversation context and long-term preferences without custom storage solutions, Amazon Bedrock AgentCore Identity for secure multi-IDP authentication, and Amazon Bedrock AgentCore Runtime for serverless scaling and session isolation. We will also use Amazon Bedrock Knowledge Bases for managed RAG and event data retrieval. Read More
Breaking the Host Memory Bottleneck: How Peer Direct Transformed Gaudi’s Cloud PerformanceTowards Data Science Engineering RDMA-like performance over cloud host NICs using libfabric, DMA-BUF, and HCCL to restore distributed training scalability
The post Breaking the Host Memory Bottleneck: How Peer Direct Transformed Gaudi’s Cloud Performance appeared first on Towards Data Science.
Engineering RDMA-like performance over cloud host NICs using libfabric, DMA-BUF, and HCCL to restore distributed training scalability
The post Breaking the Host Memory Bottleneck: How Peer Direct Transformed Gaudi’s Cloud Performance appeared first on Towards Data Science. Read More
ActionEngine: From Reactive to Programmatic GUI Agents via State Machine Memorycs.AI updates on arXiv.org arXiv:2602.20502v1 Announce Type: new
Abstract: Existing Graphical User Interface (GUI) agents operate through step-by-step calls to vision language models–taking a screenshot, reasoning about the next action, executing it, then repeating on the new page–resulting in high costs and latency that scale with the number of reasoning steps, and limited accuracy due to no persistent memory of previously visited pages.
We propose ActionEngine, a training-free framework that transitions from reactive execution to programmatic planning through a novel two-agent architecture: a Crawling Agent that constructs an updatable state-machine memory of the GUIs through offline exploration, and an Execution Agent that leverages this memory to synthesize complete, executable Python programs for online task execution.
To ensure robustness against evolving interfaces, execution failures trigger a vision-based re-grounding fallback that repairs the failed action and updates the memory.
This design drastically improves both efficiency and accuracy: on Reddit tasks from the WebArena benchmark, our agent achieves 95% task success with on average a single LLM call, compared to 66% for the strongest vision-only baseline, while reducing cost by 11.8x and end-to-end latency by 2x.
Together, these components yield scalable and reliable GUI interaction by combining global programmatic planning, crawler-validated action templates, and node-level execution with localized validation and repair.
arXiv:2602.20502v1 Announce Type: new
Abstract: Existing Graphical User Interface (GUI) agents operate through step-by-step calls to vision language models–taking a screenshot, reasoning about the next action, executing it, then repeating on the new page–resulting in high costs and latency that scale with the number of reasoning steps, and limited accuracy due to no persistent memory of previously visited pages.
We propose ActionEngine, a training-free framework that transitions from reactive execution to programmatic planning through a novel two-agent architecture: a Crawling Agent that constructs an updatable state-machine memory of the GUIs through offline exploration, and an Execution Agent that leverages this memory to synthesize complete, executable Python programs for online task execution.
To ensure robustness against evolving interfaces, execution failures trigger a vision-based re-grounding fallback that repairs the failed action and updates the memory.
This design drastically improves both efficiency and accuracy: on Reddit tasks from the WebArena benchmark, our agent achieves 95% task success with on average a single LLM call, compared to 66% for the strongest vision-only baseline, while reducing cost by 11.8x and end-to-end latency by 2x.
Together, these components yield scalable and reliable GUI interaction by combining global programmatic planning, crawler-validated action templates, and node-level execution with localized validation and repair. Read More
Using the Path of Least Resistance to Explain Deep Networkscs.AI updates on arXiv.org arXiv:2502.12108v2 Announce Type: replace-cross
Abstract: Integrated Gradients (IG), a widely used axiomatic path-based attribution method, assigns importance scores to input features by integrating model gradients along a straight path from a baseline to the input. While effective in some cases, we show that straight paths can lead to flawed attributions. In this paper, we identify the cause of these misattributions and propose an alternative approach that equips the input space with a model-induced Riemannian metric (derived from the explained model’s Jacobian) and computes attributions by integrating gradients along geodesics under this metric. We call this method Geodesic Integrated Gradients (GIG). To approximate geodesic paths, we introduce two techniques: a k-Nearest Neighbours-based approach for smaller models and a Stochastic Variational Inference-based method for larger ones. Additionally, we propose a new axiom, No-Cancellation Completeness (NCC), which strengthens completeness by ruling out feature-wise cancellation. We prove that, for path-based attributions under the model-induced metric, NCC holds if and only if the integration path is a geodesic. Through experiments on both synthetic and real-world image classification data, we provide empirical evidence supporting our theoretical analysis and showing that GIG produces more faithful attributions than existing methods, including IG, on the benchmarks considered.
arXiv:2502.12108v2 Announce Type: replace-cross
Abstract: Integrated Gradients (IG), a widely used axiomatic path-based attribution method, assigns importance scores to input features by integrating model gradients along a straight path from a baseline to the input. While effective in some cases, we show that straight paths can lead to flawed attributions. In this paper, we identify the cause of these misattributions and propose an alternative approach that equips the input space with a model-induced Riemannian metric (derived from the explained model’s Jacobian) and computes attributions by integrating gradients along geodesics under this metric. We call this method Geodesic Integrated Gradients (GIG). To approximate geodesic paths, we introduce two techniques: a k-Nearest Neighbours-based approach for smaller models and a Stochastic Variational Inference-based method for larger ones. Additionally, we propose a new axiom, No-Cancellation Completeness (NCC), which strengthens completeness by ruling out feature-wise cancellation. We prove that, for path-based attributions under the model-induced metric, NCC holds if and only if the integration path is a geodesic. Through experiments on both synthetic and real-world image classification data, we provide empirical evidence supporting our theoretical analysis and showing that GIG produces more faithful attributions than existing methods, including IG, on the benchmarks considered. Read More
How to Define the Modeling Scope of an Internal Credit Risk ModelTowards Data Science Dataset construction for Internal Ratings-Based (IRB) Probability of Default (PD) models
The post How to Define the Modeling Scope of an Internal Credit Risk Model appeared first on Towards Data Science.
Dataset construction for Internal Ratings-Based (IRB) Probability of Default (PD) models
The post How to Define the Modeling Scope of an Internal Credit Risk Model appeared first on Towards Data Science. Read More
Nokia and AWS pilot AI automation for real-time 5G network slicingAI News Telecom networks may soon begin adjusting themselves in real time, as operators test systems that allow AI agents to manage traffic and service quality. AI may soon be making operational decisions. This week, Nokia and AWS presented a new network slicing system that uses AI agents to monitor network conditions and adjust resources automatically. The
The post Nokia and AWS pilot AI automation for real-time 5G network slicing appeared first on AI News.
Telecom networks may soon begin adjusting themselves in real time, as operators test systems that allow AI agents to manage traffic and service quality. AI may soon be making operational decisions. This week, Nokia and AWS presented a new network slicing system that uses AI agents to monitor network conditions and adjust resources automatically. The
The post Nokia and AWS pilot AI automation for real-time 5G network slicing appeared first on AI News. Read More
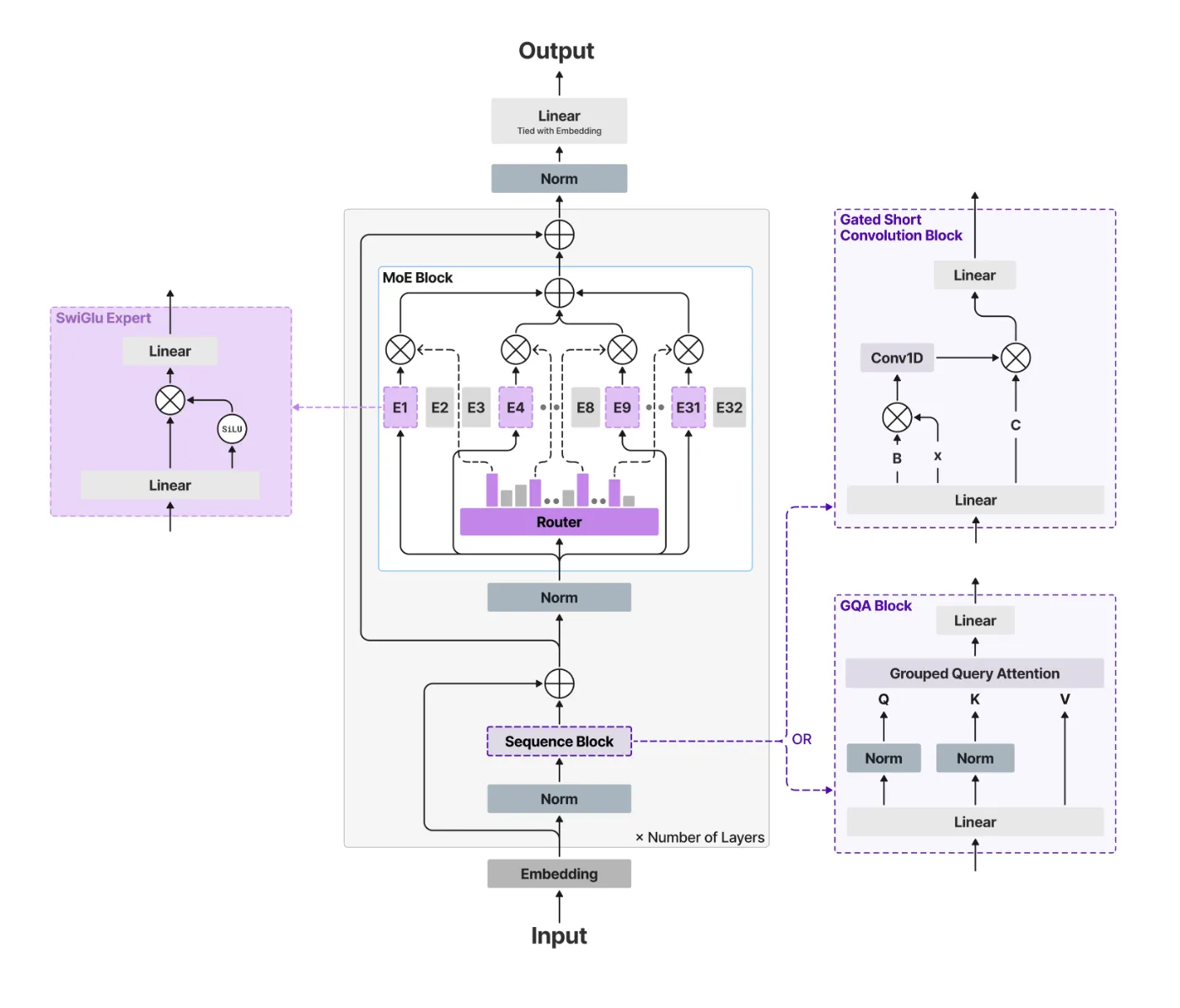
Liquid AI’s New LFM2-24B-A2B Hybrid Architecture Blends Attention with Convolutions to Solve the Scaling Bottlenecks of Modern LLMsMarkTechPost The generative AI race has long been a game of ‘bigger is better.’ But as the industry hits the limits of power consumption and memory bottlenecks, the conversation is shifting from raw parameter counts to architectural efficiency. Liquid AI team is leading this charge with the release of LFM2-24B-A2B, a 24-billion parameter model that redefines
The post Liquid AI’s New LFM2-24B-A2B Hybrid Architecture Blends Attention with Convolutions to Solve the Scaling Bottlenecks of Modern LLMs appeared first on MarkTechPost.
The generative AI race has long been a game of ‘bigger is better.’ But as the industry hits the limits of power consumption and memory bottlenecks, the conversation is shifting from raw parameter counts to architectural efficiency. Liquid AI team is leading this charge with the release of LFM2-24B-A2B, a 24-billion parameter model that redefines
The post Liquid AI’s New LFM2-24B-A2B Hybrid Architecture Blends Attention with Convolutions to Solve the Scaling Bottlenecks of Modern LLMs appeared first on MarkTechPost. Read More
Does Order Matter : Connecting The Law of Robustness to Robust Generalizationcs.AI updates on arXiv.org arXiv:2602.20971v1 Announce Type: cross
Abstract: Bubeck and Sellke (2021) pose as an open problem the connection between the law of robustness and robust generalization. The law of robustness states that overparameterization is necessary for models to interpolate robustly; in particular, robust interpolation requires the learned function to be Lipschitz. Robust generalization asks whether small robust training loss implies small robust test loss. We resolve this problem by explicitly connecting the two for arbitrary data distributions. Specifically, we introduce a nontrivial notion of robust generalization error and convert it into a lower bound on the expected Rademacher complexity of the induced robust loss class. Our bounds recover the $Omega(n^{1/d})$ regime of Wu et al. (2023) and show that, up to constants, robust generalization does not change the order of the Lipschitz constant required for smooth interpolation. We conduct experiments to probe the predicted scaling with dataset size and model capacity, testing whether empirical behavior aligns more closely with the predictions of Bubeck and Sellke (2021) or Wu et al. (2023). For MNIST, we find that the lower-bound Lipschitz constant scales on the order predicted by Wu et al. (2023). Informally, to obtain low robust generalization error, the Lipschitz constant must lie in a range that we bound, and the allowable perturbation radius is linked to the Lipschitz scale.
arXiv:2602.20971v1 Announce Type: cross
Abstract: Bubeck and Sellke (2021) pose as an open problem the connection between the law of robustness and robust generalization. The law of robustness states that overparameterization is necessary for models to interpolate robustly; in particular, robust interpolation requires the learned function to be Lipschitz. Robust generalization asks whether small robust training loss implies small robust test loss. We resolve this problem by explicitly connecting the two for arbitrary data distributions. Specifically, we introduce a nontrivial notion of robust generalization error and convert it into a lower bound on the expected Rademacher complexity of the induced robust loss class. Our bounds recover the $Omega(n^{1/d})$ regime of Wu et al. (2023) and show that, up to constants, robust generalization does not change the order of the Lipschitz constant required for smooth interpolation. We conduct experiments to probe the predicted scaling with dataset size and model capacity, testing whether empirical behavior aligns more closely with the predictions of Bubeck and Sellke (2021) or Wu et al. (2023). For MNIST, we find that the lower-bound Lipschitz constant scales on the order predicted by Wu et al. (2023). Informally, to obtain low robust generalization error, the Lipschitz constant must lie in a range that we bound, and the allowable perturbation radius is linked to the Lipschitz scale. Read More