Role Intelligence Director of AI Governance — At a Glance IAPP Salary Survey 2025–26 Axial Search AI Governance Jobs 2026 Glassdoor Director of AI Salaries 20-Role Taxonomy Master Table Director of AI Governance ▲ HIGH DEMAND Directors of AI Governance define enterprise-wide AI strategy across compliance, ethics, and risk. This senior leadership role bridges technical […]
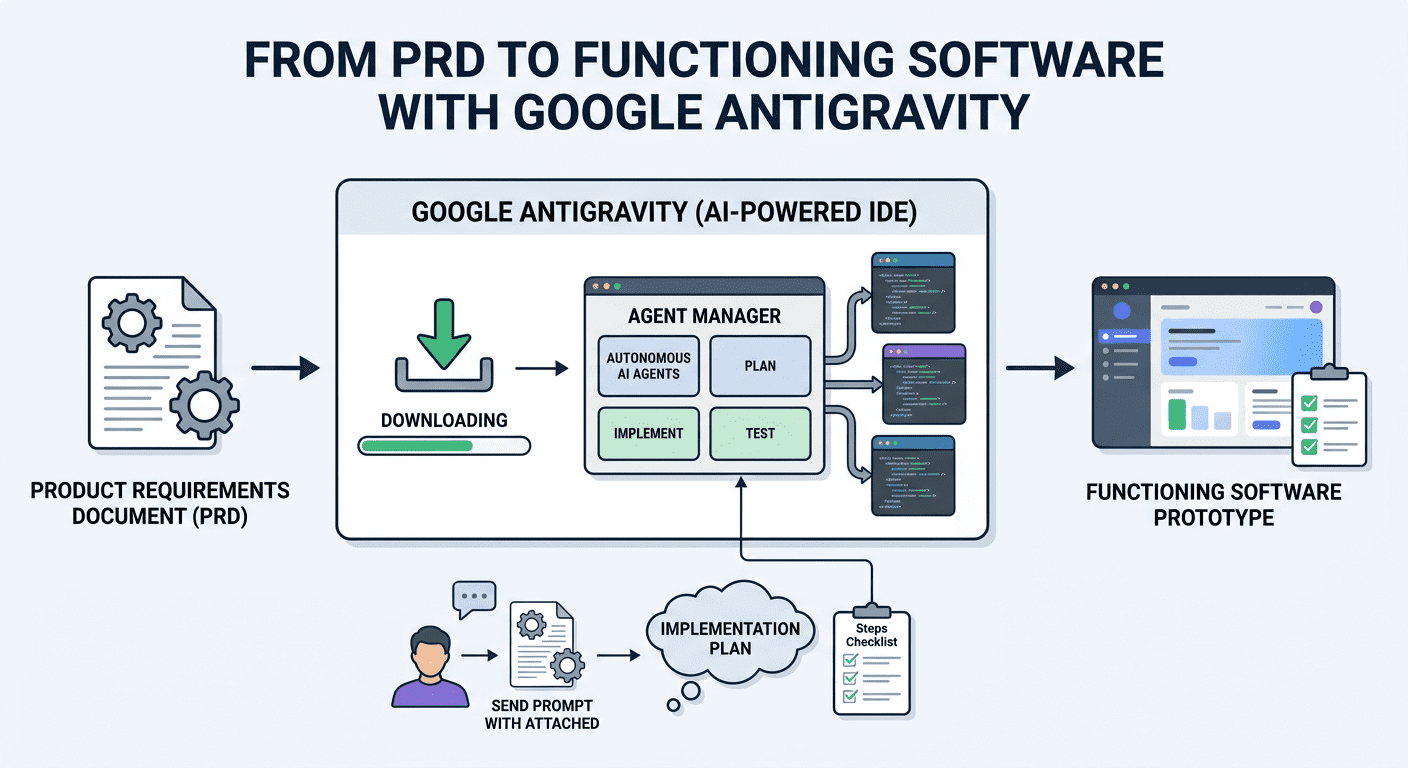
From PRD to Functioning Software with Google AntigravityKDnuggets This article guide you through an example use case to turn a PRD into a functioning software prototype using Google Antigravity.
This article guide you through an example use case to turn a PRD into a functioning software prototype using Google Antigravity. Read More

Why You Should Stop Writing Loops in Pandas Towards Data Science How to think in columns, write faster code, and finally use Pandas like a professional
The post Why You Should Stop Writing Loops in Pandas appeared first on Towards Data Science.
How to think in columns, write faster code, and finally use Pandas like a professional
The post Why You Should Stop Writing Loops in Pandas appeared first on Towards Data Science. Read More

Best AI security solutions 2026: Top enterprise platforms comparedAI News Artificial intelligence is no longer just powering defensive cybersecurity tools, it is reshaping the entire threat landscape. AI is accelerating reconnaissance, improving the realism of phishing, automating malware mutation, and enabling adaptive attack techniques. At the same time, enterprises are embedding AI agents, copilots, and generative AI tools into everyday workflows. That dual dynamic has
The post Best AI security solutions 2026: Top enterprise platforms compared appeared first on AI News.
Artificial intelligence is no longer just powering defensive cybersecurity tools, it is reshaping the entire threat landscape. AI is accelerating reconnaissance, improving the realism of phishing, automating malware mutation, and enabling adaptive attack techniques. At the same time, enterprises are embedding AI agents, copilots, and generative AI tools into everyday workflows. That dual dynamic has
The post Best AI security solutions 2026: Top enterprise platforms compared appeared first on AI News. Read More
The integration of AI in modern forex automationAI News Try to think of just one area where artificial intelligence is not leaving a mark, and you’ll realise there’s almost none. And in the forex world, things have not been any different. It’s a big part of why Fortune Business Insights values the global AI market size at $375.93 billion. Looking ahead, the sector could
The post The integration of AI in modern forex automation appeared first on AI News.
Try to think of just one area where artificial intelligence is not leaving a mark, and you’ll realise there’s almost none. And in the forex world, things have not been any different. It’s a big part of why Fortune Business Insights values the global AI market size at $375.93 billion. Looking ahead, the sector could
The post The integration of AI in modern forex automation appeared first on AI News. Read More
7 Essential OpenClaw Skills You Need Right NowKDnuggets Skills are what make OpenClaw more than a local assistant, and these are the most popular ones worth installing today.
Skills are what make OpenClaw more than a local assistant, and these are the most popular ones worth installing today. Read More
Gemini 3.1 Flash-Lite: Built for intelligence at scaleGoogle DeepMind News Gemini 3.1 Flash-Lite is our fastest and most cost-efficient Gemini 3 series model yet.
Gemini 3.1 Flash-Lite is our fastest and most cost-efficient Gemini 3 series model yet. Read More

Building a scalable virtual try-on solution using Amazon Nova on AWS: part 1 Artificial Intelligence
Building a scalable virtual try-on solution using Amazon Nova on AWS: part 1Artificial Intelligence In this post, we explore the virtual try-on capability now available in Amazon Nova Canvas, including sample code to get started quickly and tips to help get the best outputs.
In this post, we explore the virtual try-on capability now available in Amazon Nova Canvas, including sample code to get started quickly and tips to help get the best outputs. Read More
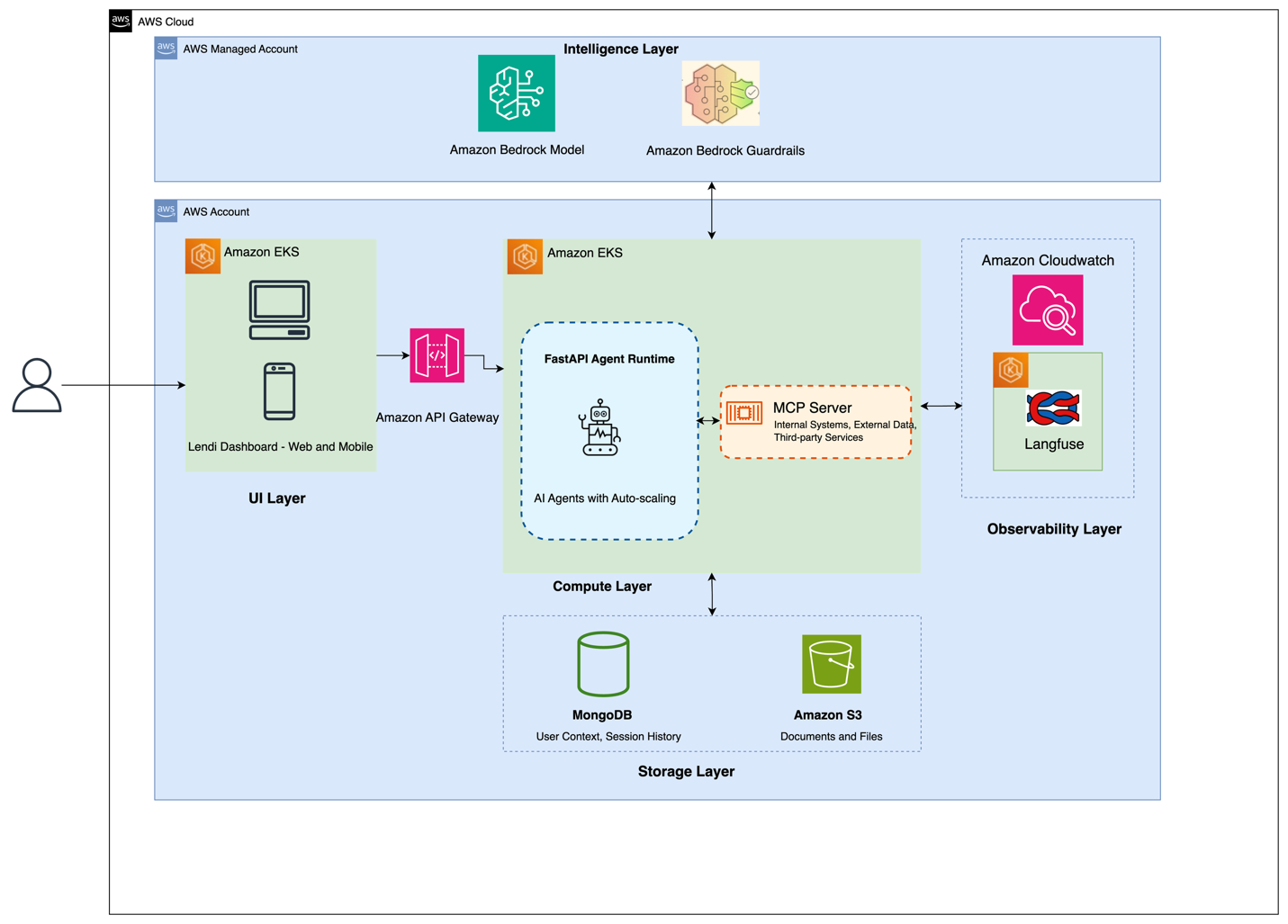
How Lendi revamped the refinance journey for its customers using agentic AI in 16 weeks using Amazon BedrockArtificial Intelligence This post details how Lendi Group built their AI-powered Home Loan Guardian using Amazon Bedrock, the challenges they faced, the architecture they implemented, and the significant business outcomes they’ve achieved. Their journey offers valuable insights for organizations that want to use generative AI to transform customer experiences while maintaining the human touch that builds trust and loyalty.
This post details how Lendi Group built their AI-powered Home Loan Guardian using Amazon Bedrock, the challenges they faced, the architecture they implemented, and the significant business outcomes they’ve achieved. Their journey offers valuable insights for organizations that want to use generative AI to transform customer experiences while maintaining the human touch that builds trust and loyalty. Read More
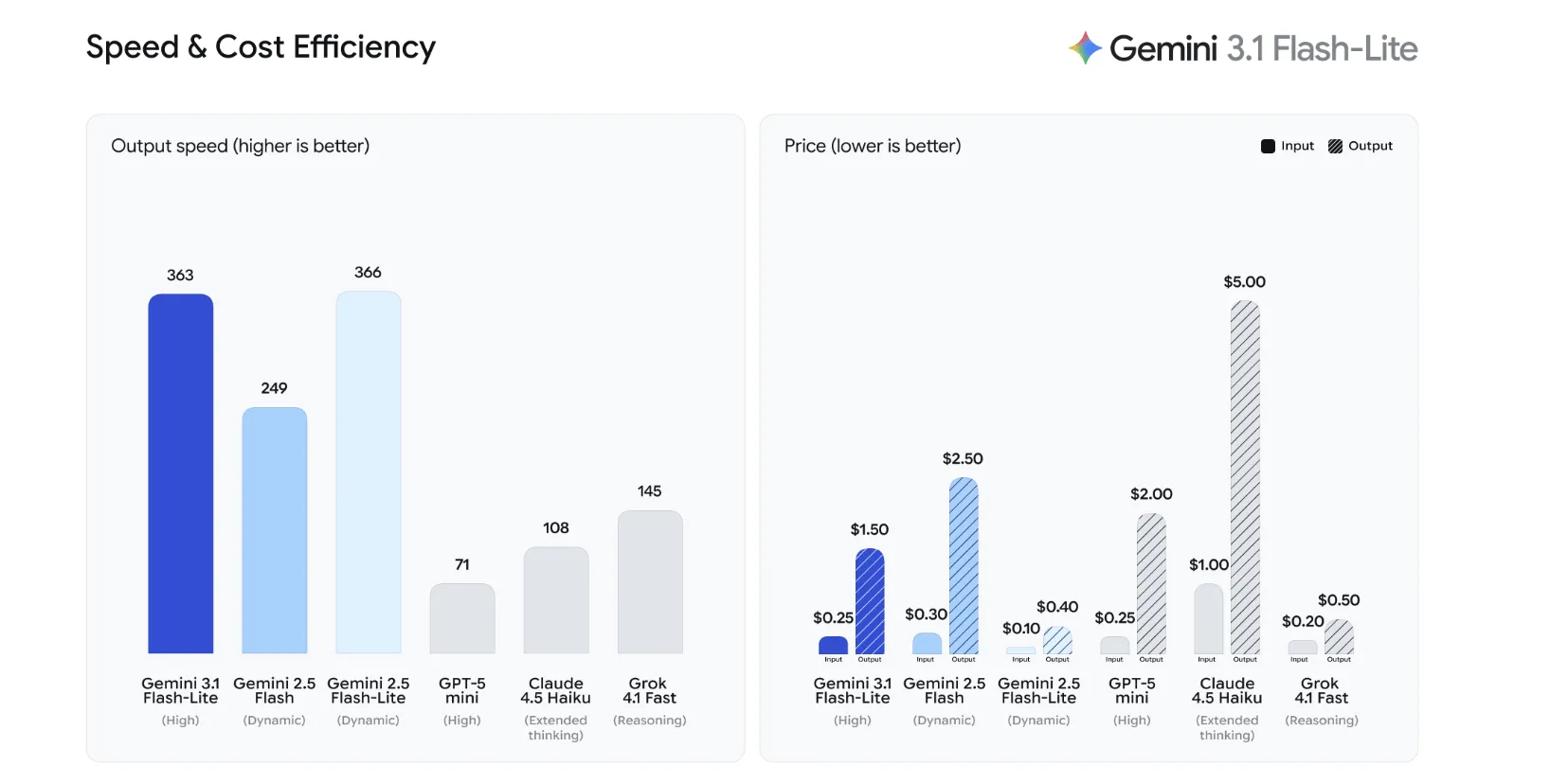
Google Drops Gemini 3.1 Flash-Lite: A Cost-efficient Powerhouse with Adjustable Thinking Levels Designed for High-Scale Production AIMarkTechPost Google has released Gemini 3.1 Flash-Lite, the most cost-efficient entry in the Gemini 3 model series. Designed for ‘intelligence at scale,’ this model is optimized for high-volume tasks where low latency and cost-per-token are the primary engineering constraints. It is currently available in Public Preview via the Gemini API (Google AI Studio) and Vertex AI.
The post Google Drops Gemini 3.1 Flash-Lite: A Cost-efficient Powerhouse with Adjustable Thinking Levels Designed for High-Scale Production AI appeared first on MarkTechPost.
Google has released Gemini 3.1 Flash-Lite, the most cost-efficient entry in the Gemini 3 model series. Designed for ‘intelligence at scale,’ this model is optimized for high-volume tasks where low latency and cost-per-token are the primary engineering constraints. It is currently available in Public Preview via the Gemini API (Google AI Studio) and Vertex AI.
The post Google Drops Gemini 3.1 Flash-Lite: A Cost-efficient Powerhouse with Adjustable Thinking Levels Designed for High-Scale Production AI appeared first on MarkTechPost. Read More