
SASER: Stego attacks on open-source LLMscs.AI updates on arXiv.org arXiv:2510.10486v1 Announce Type: cross
Abstract: Open-source large language models (LLMs) have demonstrated considerable dominance over proprietary LLMs in resolving neural processing tasks, thanks to the collaborative and sharing nature. Although full access to source codes, model parameters, and training data lays the groundwork for transparency, we argue that such a full-access manner is vulnerable to stego attacks, and their ill-effects are not fully understood. In this paper, we conduct a systematic formalization for stego attacks on open-source LLMs by enumerating all possible threat models associated with adversary objectives, knowledge, and capabilities. Therein, the threat posed by adversaries with internal knowledge, who inject payloads and triggers during the model sharing phase, is of practical interest. We go even further and propose the first stego attack on open-source LLMs, dubbed SASER, which wields impacts through identifying targeted parameters, embedding payloads, injecting triggers, and executing payloads sequentially. Particularly, SASER enhances the attack robustness against quantization-based local deployment by de-quantizing the embedded payloads. In addition, to achieve stealthiness, SASER devises the performance-aware importance metric to identify targeted parameters with the least degradation of model performance. Extensive experiments on LlaMA2-7B and ChatGLM3-6B, without quantization, show that the stealth rate of SASER outperforms existing stego attacks (for general DNNs) by up to 98.1%, while achieving the same attack success rate (ASR) of 100%. More importantly, SASER improves ASR on quantized models from 0 to 100% in all settings. We appeal for investigations on countermeasures against SASER in view of the significant attack effectiveness.
arXiv:2510.10486v1 Announce Type: cross
Abstract: Open-source large language models (LLMs) have demonstrated considerable dominance over proprietary LLMs in resolving neural processing tasks, thanks to the collaborative and sharing nature. Although full access to source codes, model parameters, and training data lays the groundwork for transparency, we argue that such a full-access manner is vulnerable to stego attacks, and their ill-effects are not fully understood. In this paper, we conduct a systematic formalization for stego attacks on open-source LLMs by enumerating all possible threat models associated with adversary objectives, knowledge, and capabilities. Therein, the threat posed by adversaries with internal knowledge, who inject payloads and triggers during the model sharing phase, is of practical interest. We go even further and propose the first stego attack on open-source LLMs, dubbed SASER, which wields impacts through identifying targeted parameters, embedding payloads, injecting triggers, and executing payloads sequentially. Particularly, SASER enhances the attack robustness against quantization-based local deployment by de-quantizing the embedded payloads. In addition, to achieve stealthiness, SASER devises the performance-aware importance metric to identify targeted parameters with the least degradation of model performance. Extensive experiments on LlaMA2-7B and ChatGLM3-6B, without quantization, show that the stealth rate of SASER outperforms existing stego attacks (for general DNNs) by up to 98.1%, while achieving the same attack success rate (ASR) of 100%. More importantly, SASER improves ASR on quantized models from 0 to 100% in all settings. We appeal for investigations on countermeasures against SASER in view of the significant attack effectiveness. Read More
Distributionally Robust Control with End-to-End Statistically Guaranteed Metric Learningcs.AI updates on arXiv.org arXiv:2510.10214v1 Announce Type: cross
Abstract: Wasserstein distributionally robust control (DRC) recently emerges as a principled paradigm for handling uncertainty in stochastic dynamical systems. However, it constructs data-driven ambiguity sets via uniform distribution shifts before sequentially incorporating them into downstream control synthesis. This segregation between ambiguity set construction and control objectives inherently introduces a structural misalignment, which undesirably leads to conservative control policies with sub-optimal performance. To address this limitation, we propose a novel end-to-end finite-horizon Wasserstein DRC framework that integrates the learning of anisotropic Wasserstein metrics with downstream control tasks in a closed-loop manner, thus enabling ambiguity sets to be systematically adjusted along performance-critical directions and yielding more effective control policies. This framework is formulated as a bilevel program: the inner level characterizes dynamical system evolution under DRC, while the outer level refines the anisotropic metric leveraging control-performance feedback across a range of initial conditions. To solve this program efficiently, we develop a stochastic augmented Lagrangian algorithm tailored to the bilevel structure. Theoretically, we prove that the learned ambiguity sets preserve statistical finite-sample guarantees under a novel radius adjustment mechanism, and we establish the well-posedness of the bilevel formulation by demonstrating its continuity with respect to the learnable metric. Furthermore, we show that the algorithm converges to stationary points of the outer level problem, which are statistically consistent with the optimal metric at a non-asymptotic convergence rate. Experiments on both numerical and inventory control tasks verify that the proposed framework achieves superior closed-loop performance and robustness compared against state-of-the-art methods.
arXiv:2510.10214v1 Announce Type: cross
Abstract: Wasserstein distributionally robust control (DRC) recently emerges as a principled paradigm for handling uncertainty in stochastic dynamical systems. However, it constructs data-driven ambiguity sets via uniform distribution shifts before sequentially incorporating them into downstream control synthesis. This segregation between ambiguity set construction and control objectives inherently introduces a structural misalignment, which undesirably leads to conservative control policies with sub-optimal performance. To address this limitation, we propose a novel end-to-end finite-horizon Wasserstein DRC framework that integrates the learning of anisotropic Wasserstein metrics with downstream control tasks in a closed-loop manner, thus enabling ambiguity sets to be systematically adjusted along performance-critical directions and yielding more effective control policies. This framework is formulated as a bilevel program: the inner level characterizes dynamical system evolution under DRC, while the outer level refines the anisotropic metric leveraging control-performance feedback across a range of initial conditions. To solve this program efficiently, we develop a stochastic augmented Lagrangian algorithm tailored to the bilevel structure. Theoretically, we prove that the learned ambiguity sets preserve statistical finite-sample guarantees under a novel radius adjustment mechanism, and we establish the well-posedness of the bilevel formulation by demonstrating its continuity with respect to the learnable metric. Furthermore, we show that the algorithm converges to stationary points of the outer level problem, which are statistically consistent with the optimal metric at a non-asymptotic convergence rate. Experiments on both numerical and inventory control tasks verify that the proposed framework achieves superior closed-loop performance and robustness compared against state-of-the-art methods. Read More
The algorithmic regulatorcs.AI updates on arXiv.org arXiv:2510.10300v1 Announce Type: cross
Abstract: The regulator theorem states that, under certain conditions, any optimal controller must embody a model of the system it regulates, grounding the idea that controllers embed, explicitly or implicitly, internal models of the controlled. This principle underpins neuroscience and predictive brain theories like the Free-Energy Principle or Kolmogorov/Algorithmic Agent theory. However, the theorem is only proven in limited settings. Here, we treat the deterministic, closed, coupled world-regulator system $(W,R)$ as a single self-delimiting program $p$ via a constant-size wrapper that produces the world output string~$x$ fed to the regulator. We analyze regulation from the viewpoint of the algorithmic complexity of the output, $K(x)$. We define $R$ to be a emph{good algorithmic regulator} if it emph{reduces} the algorithmic complexity of the readout relative to a null (unregulated) baseline $varnothing$, i.e., [ Delta = Kbig(O_{W,varnothing}big) – Kbig(O_{W,R}big) > 0. ] We then prove that the larger $Delta$ is, the more world-regulator pairs with high mutual algorithmic information are favored. More precisely, a complexity gap $Delta > 0$ yields [ Prbig((W,R)mid xbig) le C,2^{,M(W{:}R)},2^{-Delta}, ] making low $M(W{:}R)$ exponentially unlikely as $Delta$ grows. This is an AIT version of the idea that “the regulator contains a model of the world.” The framework is distribution-free, applies to individual sequences, and complements the Internal Model Principle. Beyond this necessity claim, the same coding-theorem calculus singles out a emph{canonical scalar objective} and implicates a emph{planner}. On the realized episode, a regulator behaves emph{as if} it minimized the conditional description length of the readout.
arXiv:2510.10300v1 Announce Type: cross
Abstract: The regulator theorem states that, under certain conditions, any optimal controller must embody a model of the system it regulates, grounding the idea that controllers embed, explicitly or implicitly, internal models of the controlled. This principle underpins neuroscience and predictive brain theories like the Free-Energy Principle or Kolmogorov/Algorithmic Agent theory. However, the theorem is only proven in limited settings. Here, we treat the deterministic, closed, coupled world-regulator system $(W,R)$ as a single self-delimiting program $p$ via a constant-size wrapper that produces the world output string~$x$ fed to the regulator. We analyze regulation from the viewpoint of the algorithmic complexity of the output, $K(x)$. We define $R$ to be a emph{good algorithmic regulator} if it emph{reduces} the algorithmic complexity of the readout relative to a null (unregulated) baseline $varnothing$, i.e., [ Delta = Kbig(O_{W,varnothing}big) – Kbig(O_{W,R}big) > 0. ] We then prove that the larger $Delta$ is, the more world-regulator pairs with high mutual algorithmic information are favored. More precisely, a complexity gap $Delta > 0$ yields [ Prbig((W,R)mid xbig) le C,2^{,M(W{:}R)},2^{-Delta}, ] making low $M(W{:}R)$ exponentially unlikely as $Delta$ grows. This is an AIT version of the idea that “the regulator contains a model of the world.” The framework is distribution-free, applies to individual sequences, and complements the Internal Model Principle. Beyond this necessity claim, the same coding-theorem calculus singles out a emph{canonical scalar objective} and implicates a emph{planner}. On the realized episode, a regulator behaves emph{as if} it minimized the conditional description length of the readout. Read More

10 Useful Python One-Liners for CSV ProcessingKDnuggets Working with CSVs? These Python one-liners make common file operations faster and cleaner.
Working with CSVs? These Python one-liners make common file operations faster and cleaner. Read More

Data Analytics Automation Scripts with SQL Stored ProceduresKDnuggets Simplify your query with reusable executed scripts.
Simplify your query with reusable executed scripts. Read More
The Beginner’s Guide to Tracking Token Usage in LLM AppsKDnuggets If you’re not tracking tokens, you’re basically burning cash every time your app talks to an LLM.
If you’re not tracking tokens, you’re basically burning cash every time your app talks to an LLM. Read More
5 Signs Your Business Is Ready For AI (Sponsored)KDnuggets How do you know if you’re ready to take the AI plunge? Here are five dead giveaways that AI could transform how you work.
How do you know if you’re ready to take the AI plunge? Here are five dead giveaways that AI could transform how you work. Read More

Here’s When You Would Choose Spreadsheets Over SQLKDnuggets Spreadsheets might seem obsolete in the world of relational databases. They’re not! Here are situations when spreadsheets easily topple SQL.
Spreadsheets might seem obsolete in the world of relational databases. They’re not! Here are situations when spreadsheets easily topple SQL. Read More
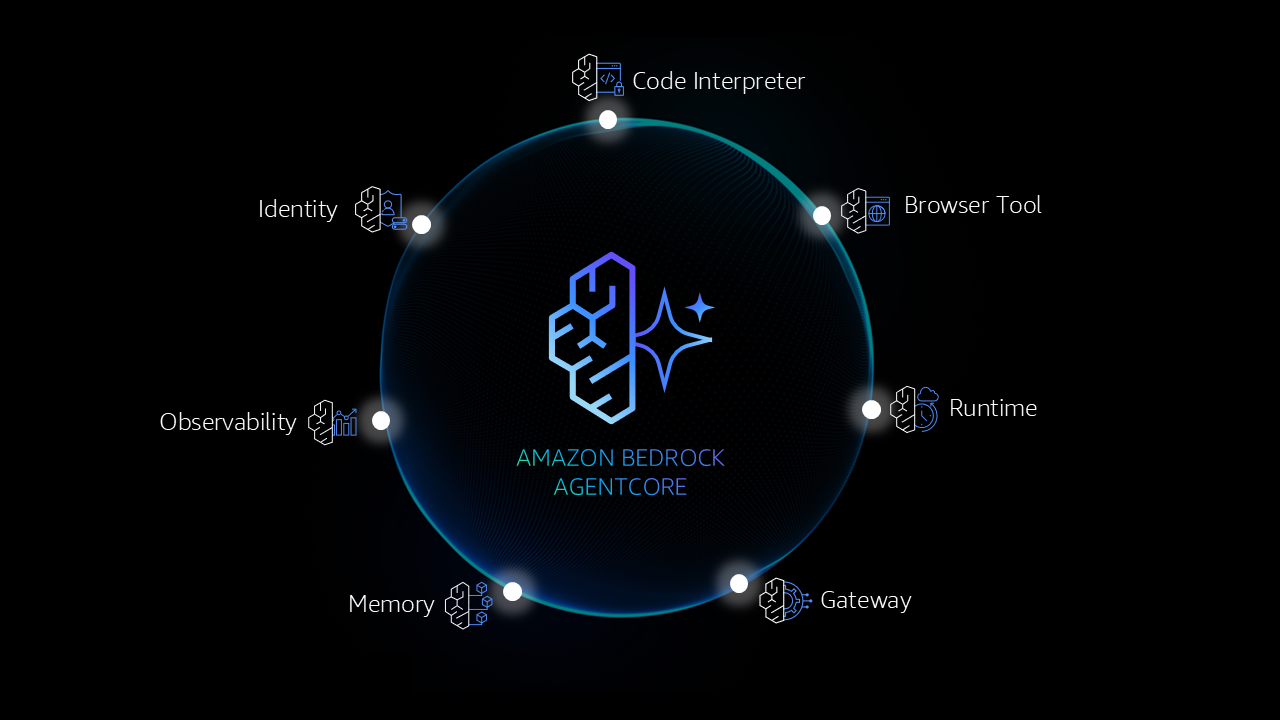
Make agents a reality with Amazon Bedrock AgentCore: Now generally availableArtificial Intelligence Learn why customers choose AgentCore to build secure, reliable AI solutions using their choice of frameworks and models for production workloads.
Learn why customers choose AgentCore to build secure, reliable AI solutions using their choice of frameworks and models for production workloads. Read More
What Is Your Agent’s GPA? A Framework for Evaluating Agent Goal-Plan-Action Alignmentcs.AI updates on arXiv.org arXiv:2510.08847v1 Announce Type: new
Abstract: We introduce the Agent GPA (Goal-Plan-Action) framework: an evaluation paradigm based on an agent’s operational loop of setting goals, devising plans, and executing actions. The framework includes five evaluation metrics: Goal Fulfillment, Logical Consistency, Execution Efficiency, Plan Quality, and Plan Adherence. Logical Consistency checks that an agent’s actions are consistent with its prior actions. Execution Efficiency checks whether the agent executes in the most efficient way to achieve its goal. Plan Quality checks whether an agent’s plans are aligned with its goals; Plan Adherence checks if an agent’s actions are aligned with its plan; and Goal Fulfillment checks that agent’s final outcomes match the stated goals. Our experimental results on two benchmark datasets – the public TRAIL/GAIA dataset and an internal dataset for a production-grade data agent – show that this framework (a) provides a systematic way to cover a broad range of agent failures, including all agent errors on the TRAIL/GAIA benchmark dataset; (b) supports LLM-judges that exhibit strong agreement with human annotation, covering 80% to over 95% errors; and (c) localizes errors with 86% agreement to enable targeted improvement of agent performance.
arXiv:2510.08847v1 Announce Type: new
Abstract: We introduce the Agent GPA (Goal-Plan-Action) framework: an evaluation paradigm based on an agent’s operational loop of setting goals, devising plans, and executing actions. The framework includes five evaluation metrics: Goal Fulfillment, Logical Consistency, Execution Efficiency, Plan Quality, and Plan Adherence. Logical Consistency checks that an agent’s actions are consistent with its prior actions. Execution Efficiency checks whether the agent executes in the most efficient way to achieve its goal. Plan Quality checks whether an agent’s plans are aligned with its goals; Plan Adherence checks if an agent’s actions are aligned with its plan; and Goal Fulfillment checks that agent’s final outcomes match the stated goals. Our experimental results on two benchmark datasets – the public TRAIL/GAIA dataset and an internal dataset for a production-grade data agent – show that this framework (a) provides a systematic way to cover a broad range of agent failures, including all agent errors on the TRAIL/GAIA benchmark dataset; (b) supports LLM-judges that exhibit strong agreement with human annotation, covering 80% to over 95% errors; and (c) localizes errors with 86% agreement to enable targeted improvement of agent performance. Read More